


track demo
video slot
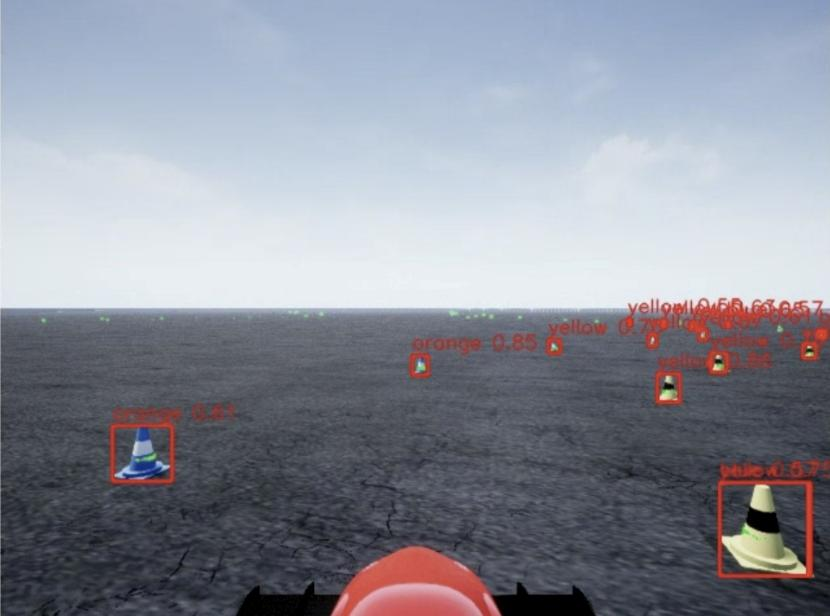
An incremental perception and control pipeline for autonomous navigation in the Formula Student Driverless Simulator (FSDS). A reactive LiDAR-only baseline isolates cone positions at 20Hz with O(n) sequential clustering and a binary density heuristic for steering, then a forward-facing camera processed by a YOLOv5 detector with FSOCO weights is fused with LiDAR depth. Pinhole ground-plane projection and nearest-neighbor matching align the two sensors to a 0.06m average match distance with near-zero systematic bias. A three-tier hybrid color verification scheme (stripe brightness, BGR channel dominance, HSV hue fallback) reaches roughly 98% accuracy at close range, and a color-aware proportional controller tracks the geometric centerline between the blue and yellow boundaries, eliminating the straight-line oscillation of the baseline while keeping a graceful fallback to the density heuristic under camera failure.